
㈜베스텔라랩은 서울대학교 동적로봇시스템 연구실(담당교수 박재흥)과 국내 자율주행차 보급 확대와 스마트 인프라 고도화를 위한 무인자율주차용 V2I(Vehicle-to-Infrastructure)플랫폼 개발에 대한 업무 협약을 체결했다.
이번 협약을 통해 실내 주차 공간에서 실시간으로 빈 주차면을 안내하는 ‘워치마일(watchmile)’ 서비스를 개발·운영하는 베스텔라랩과 서울대학교 동적로봇시스템 연구실은 주차장에서 V2I 통신을 바탕으로 지정된 구역 안에서 높은 수준의 자율주행 기술을 선보일 예정이다.
자율주행차량의 경우 안전한 주행을 위해서는 현재 자차 위치를 찾는 측위기술이 필수적이나 일반 주차장의 경우 지하에 위치해 차량이 GPS 신호를 받을 수 없어 차량이 위치를 찾지 못하는 경우가 대부분이다.
본 기술 개발 협력을 통해 솔루션이 완성되면 자율주행차는 주차장에 진입하면서부터 V2I 통신으로 IoT센서기반 측위 정보와 AI 영상분석처리 기반 주차면 정보, 보행자 안전 정보 등 인프라로부터 오는 통합 정보를 받아 빈 주차면을 찾아 스스로 주행 및 주차를 할 수 있게 된다.
 자율주행차량에게 주차장 안에서 ‘어디로’, ‘어떻게’, ‘헤매지 않고’ 가야할 지를 알려주는 것이 이 솔루션 개발에 대한 핵심이다. 이와 더불어 이 솔루션을 통해 센서 사각지대의 보행자를 인식, 자율주행차가 선제적으로 속도를 미리 줄여 안전사고를 예방하는 등 자율주행의 안정성 및 안전성을 높일 수 있다.
자율주행차량에게 주차장 안에서 ‘어디로’, ‘어떻게’, ‘헤매지 않고’ 가야할 지를 알려주는 것이 이 솔루션 개발에 대한 핵심이다. 이와 더불어 이 솔루션을 통해 센서 사각지대의 보행자를 인식, 자율주행차가 선제적으로 속도를 미리 줄여 안전사고를 예방하는 등 자율주행의 안정성 및 안전성을 높일 수 있다.
본 시연은 서울 지역에 특화된 인프라 최적화를 위해 현재 베스텔라랩 협력 주차장이자 1,430면을 보유하고 있는 서울시 최대 공영 주차장인 천호역 공영 주차장에서 진행될 예정이다.
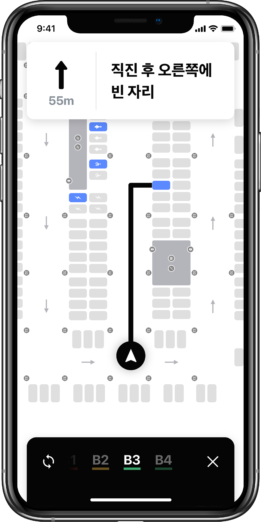
앞서 베스텔라랩은 국내 최초로 GPS 신호 없는 실내 주차장에서 영상 및 AIoT 정보를 기반으로 실시간 주차 현황과 빈 주차면의 위치를 파악하여 이용자의 성향에 맞춘 최적의 주차장 경로를 안내하는 워치마일 서비스를 개발, 제공하고 있다. 현재 천호역 공영주차장, 킨텍스 제2전시장 등에 워치마일 서비스를 제공하고 있으면, 23년까지 자율주행 V2I 통신 기술의 세계 표준을 주도하는 업체로 도약하여 자율주행 V2I 솔루션을 상용화하겠다는 것이 회사 측 설명이다.
서울대학교 박재흥 교수가 이끄는 동적로봇시스템 연구실은 공급망 운영관리 및 물류관리 전공 연구원들로 구성되었으며, 삼성전자 등 대기업과 Phantom AI와 같은 글로벌 자율주행 선도그룹과의 최적운영관리시스템 개발 프로젝트를 성공적으로 수행한 바 있다.
관련기사더보기
You must be logged in to post a comment.